
 购物车0
购物车0元器件商品{{ gnNumber + hkNumber }}
国内交货{{ gnNumber }}香港交货{{ hkNumber }}
购物车中还没有商品,赶紧选购吧





特点
•高性能,低功耗的AVR®8位微控制器
•先进的RISC架构
- 131条指令 - 绝大多数为单时钟周期执行
- 32个8位通用工作寄存器
•全静态工作
- 高达16 MIPS的吞吐量,在16兆赫
- 片上2周期乘法器
高耐用性非易失性内存段
- 对在系统内可编程闪存程序存储器32K字节
- 1024字节的EEPROM
- 2K字节内部SRAM
- 写/擦除周期:10,000闪存/ EEPROM 100000
- 数据保存: / 20年85°C百年,在25℃
- 可选Boot代码区具有独立锁定位
•在系统编程通过片上引导程序
•真正的同时读 - 写操作
- 可以对锁定的软件安全
JTAG ( IEEE 1149.1标准兼容)接口
- 边界扫描功能根据JTAG标准
- 广泛的片上调试支持
- 对Flash , EEPROM ,熔丝位和锁定位通过JTAG接口编程
外设特性
- 两个8位定时器/计数器具有独立预分频器和比较模式
- 1个16位定时器/计数器具有独立预分频器,比较功能和捕捉
模式
- 实时计数器具有独立振荡器
- 四个PWM通道
- 8通道, 10位ADC
• 8个单端通道
• 7 TQFP封装差分通道
•2个差分通道可编程增益1倍, 10倍, 200倍或
- 面向字节的两线串行接口
- 可编程的串行USART
- 主/从SPI串行接口
- 可编程看门狗定时器具有独立的片上振荡器
- 片上模拟比较器
单片机特性
- 上电复位和可编程欠压检测
- 内部标定RC振荡器
- 外部和内部中断源
- 六个睡眠模式:空闲模式, ADC噪声抑制,省电,掉电,待机
和扩展Standby
I / O和封装
- 32个可编程I / O线
- 40引脚PDIP , 44引脚TQFP和44 - QFN垫/ MLF
工作电压
- 2.7 - 5.5V的ATmega32A
速度等级
- 0 - 16 MHz时为ATmega32A
功耗在1 MHz , 3V , 25℃ ATmega32A
- 活动: 0.6毫安
- 空闲模式: 0.2毫安
- 掉电模式: 《 1 μA

ATMEGA32A-AU电路图

ATMEGA32A-AU 引脚图

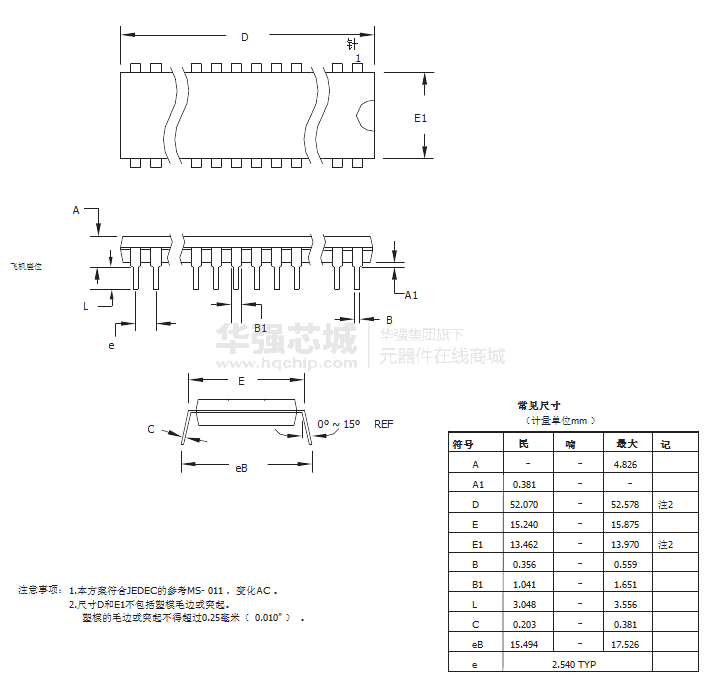
ATMEGA32A-AU 封装图
ATMEGA32A-AU 封装图

ATMEGA32A-AU 封装图
| 标题 | 类型 | 大小(KB) | 下载 |
|---|---|---|---|
| ATmega32A数据资料 | RAR | 3481.6 | 点击下载 |
| M32A系列嵌入式工控模块产品硬件手册 | RAR | 2040 | 点击下载 |
| M32A系列嵌入式工控模块产品数据手册 | RAR | 1730 | 点击下载 |
| 海尔LE32A300M型平板电视说明书 | RAR | 11900 | 点击下载 |
| 24C32A pdf datasheet | RAR | 666 | 点击下载 |
| 硬件加密芯片TF32A09手册 | DOC | 1838 | 点击下载 |
| 32A8.pdf 电子管资料数据手册 | RAR | 93 | 点击下载 |
| AVR单片机BASIC编程及开发 | RAR | 15155.2 | 点击下载 |
综合方案比较, 最终选择以ATmega128 为主控芯片,经D/A 转换后提供参考电压,与输出反馈电压进行比较,使TL494产生相应PWM 方波, 采用图腾柱驱动对Boost 升压电路进行控制,实现输出电压可调。利用INA169 进行电流采样、光耦和I...
两轮白平衡车的直立是通过负反馈来实现的,但是两轮自平衡车的直立相对木棒的直立是相对简单的,木棒的直立是二维的而自平衡车有两个轮子着地且直立是一维的。所以通过控制轮子的转动,抵消倾斜的趋势便可以很好地保...
利用ATMEGA16设计电热锅炉温度控制器的方法 电热锅炉是可将电能直接转化成热能,具有热效率高、体积小、无污染、噪声小、运行安全可靠、供热稳
摘要:介绍了以Atmegal03为主控芯片的家庭信息终端在小区智能化建设中的应用。详细阐述了Atmegal03微控制器与触摸屏和nRF401无线数据收发芯片之间接口应用的软件与
用无线电遥控的无人机大部分使用JR或者Futaba公司出品的专用遥控器,这些遥控器优点是手感好,方便携带,但是价格高昂,通道数较少,难以满足无人机执行任务时需要较多通道数的要求。
本文提出一个无线传感器设计方案,来实现主机端与传感器节点之间的通信,并且通过选用低功耗的芯片和对软件的低功耗设计实现了低功耗的目标。##系统软件设计。
...。该文提出了一种里程表检测仪的硬件设计,该设计采用ATmega16为核心的单片机系统,用变频器控制速度,实现了对不同调速比的里程表的检测。该里程表检测仪的系统电路简单可靠,用它来检测里程表方便且高效。
该方案基于Atmega128单片机和无线通信技术设计,其创新点是采用了PC控制模式和单兵运行模式两种方式对无人车进行控制,极大地增强了无人车的功能性和环境适应能力。
| AC1350 | AD7617 | AD9371 | AD7610 |
| AD8293G80 | AD7156 | ADIS16209 | ADRF6801 |
| ADS8694 | AD9577 | ADF4108 | ADP7156 |
| ADP162 | at91sam9263 | AD5622 | ADUC7027 |
| ADP2384 | AD5340 | AD8496 | ADL5365 |
 上传BOM
上传BOM

 工商网监
工商网监