电子产业一站式服务平台

步进电动机
步进电动机将脉冲信号转换为角位移或线位移。主要要求:动作灵敏、准确、重量轻、体积小、运行可靠、耗电少等。
步进电动机的结构与基本工作原理
机理:步进电机是利用电磁铁原理,将脉冲信号 转换成线位移或角位移的电机。每来一个电脉冲,电机转动一个角度,带动机械移动一小段距离。
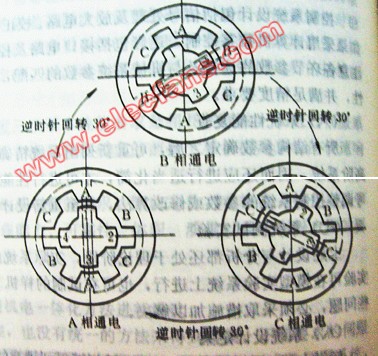
三相反应式步进电动机的工作原理如图所示,其中步进电动机的定子上有6个齿,其上分别缠有WA、WB、WC三相绕组,构成三对磁极,转子上则均匀分布着4个齿。步进电动机采用直流电源供电。当WA、WB、WC三相绕组轮流通电时,通过电磁力吸引步进电动机转子一步一步地旋转。
假设在初始状态时,A相通电,其他两相断电,在磁力作用下,转子的1、3两齿与磁极A对齐。
然后切断A相电源,同时接通B相,则由于电磁力作用,转子将逆时针转过30度,使靠近磁极B的2、4两齿与B对齐。
接着再切断B相电源,接通C相,转子又逆时针回转30度,使靠近磁极C的1、3两齿与C对齐。
如果按上述通断电顺序(即A→B→C→A……)连续向各相绕组供电,则步进电动机将按逆时针方向连续旋转。每通断电一次,步进电动机转过30度,称为一个步距角。如果改变各绕组的通断电顺序,如A→C→B→A→……,步进电动机将按顺时针方向旋转。如果改变绕组的通断电频率,则可改变步进电机的转速。
步进电动机的特点:
(1)来一个脉冲,转一个步距角。
(2)控制脉冲频率,可控制电机转速。
(3)改变脉冲顺序,改变方向。
步进电动机的种类
根据励磁式方式的不同分为:反应式、永磁式和混合式(又叫感应子式)三种。反应式步进电机的应用较多。
下面以反应式步进电机为例说明步进电机的结构和工作原理。

图7-20 (a)三相反应式步进电动机工作原理图
A 相通电,A 方向的磁通经转子形成闭合回路。若转子和磁场轴线方向原有一定角度,则在磁场的作用下,转子被磁化,吸引转子,使转子的位置力图使通电相磁路的磁阻最小,使转、定子的齿对齐停止转动。
A 相通电使转子1、3齿和 AA' 对齐。

图7-20 (b)三相反应式步进电动机工作原理图
同理,B相通电,转子2、4齿和B相轴线对齐,相对A相通电位置转30;
图7-20 (c)三相反应式步进电动机工作原理图
最后,C相通电,转子1、3齿和C相轴线对齐,相对B相通电比较,转子再次转动30。
步进电动机的结构
步进机主要由两部分构成:定子和转子。它们均由磁性材料构成,以三相为例其定子和转子上分别有六个、四个磁极 。
步进电动机结构简图
定子的六个磁极上有控制绕组,两个相对的磁极组成一相。
注意:这里的相和交流电中的“相”的概念不同。步进机通的是直流电脉冲,这主要是指线图的联接和组数的区别。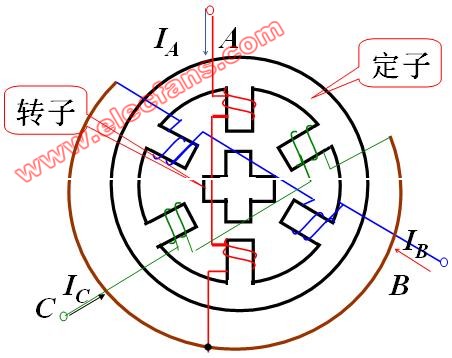
图7-22 三相反应式步进电动机结构原理图
步进电动机工作方式
(以三相步进电机为例)步进电机的工作方式可分为:三相单三拍、三相六拍、三相双三拍等。
一、三相单三拍
三相绕组中的通电顺序为:
这种工作方式,因三相绕组中每次只有一相通电,而且,一个循环周期共包括三个脉冲,所以称三相单三拍。
三相单三拍的特点:
1)每来一个电脉冲,转子转过 30。此角称为步距角,用b表示。
2)转子的旋转方向取决于三相线圈通电的顺序,改变通电顺序即可改变转向。
更详细的介绍请查看:微控电机 PPT
步进电机的应用
主要用于数字控制系统中,精度高,运行可靠。如采用位置检测和速度反馈,亦可实现闭环控制。步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表等之中,另外在工业自动化生产线、印刷设备等中亦有应用。


 工商网监
工商网监