电子产业一站式服务平台

机器人
首先循线机器人小车可以通过捕获红外传感器获取的信号来引导小车沿着地面上的线条前进。从红外传感器获取的信息经过信号放大,送入51单片机,单片机依据逻辑判断决定小车左右两侧电机的转速。单片机通过PWM技术来调控左右两侧直流减速电机的转速,当左右两侧转速相同时,小车进行直线行驶;当左侧电机转速大于右侧电机转速时,小车进行右转弯,反之小车进行左转弯。小车采用双电源供电,即控制部分采用5V直流电供电,而电机部分采用12V直流电供电。因为考虑到电机功率不是很大,因此没有采用光电隔离处理。
小车5V电源部分电路设计原理图如下:
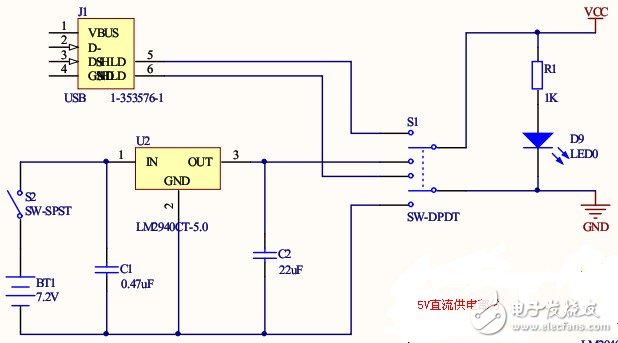
在设计中我原规划使小车即可以通过USB供电,又可以通过充电电池组供电,具体选择哪种供电方式通过S1开关进行切换。由于USB供电电源是标准的5V直流电源,因此就省去了稳压电路。而在通过电池组供电的电路中,当S2开关闭合时,电池组提供的电压经过U2的稳压再介入系统当中。U2我才有的是 LM2940CT-5.0,它可以将输出电压稳定在5V输出,输出电流最大可以达到1.25A。在电路中加入D9的发光二极管用于指示是否通电,在D9前串入一个1K欧的电阻R1用于限流。
小车12V直流电源供电部分电路设计原理图:
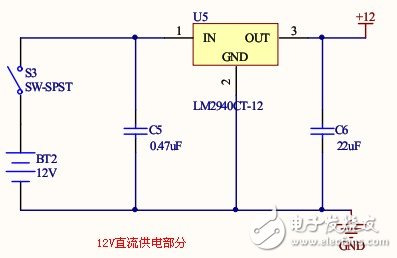
这部分电路设计同5V电源部分,只是U5部分换成了LM2940CT-12的芯片,此芯片输出电压为12V。
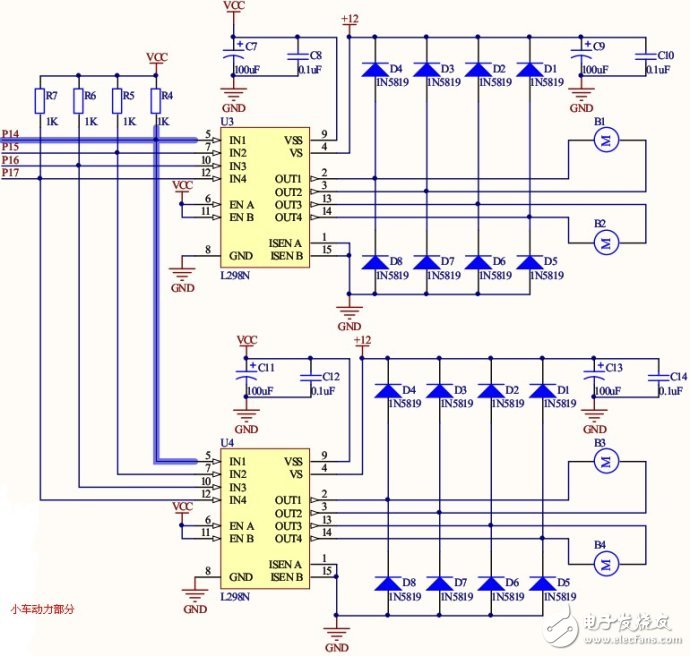
下面介绍一下小车动力部分的电路设计原理图:


 工商网监
工商网监