电子产业一站式服务平台

电磁炉检锅原理
电磁炉检锅一般采用2种,电流大小和脉冲数量。
1 电流互感器检锅:
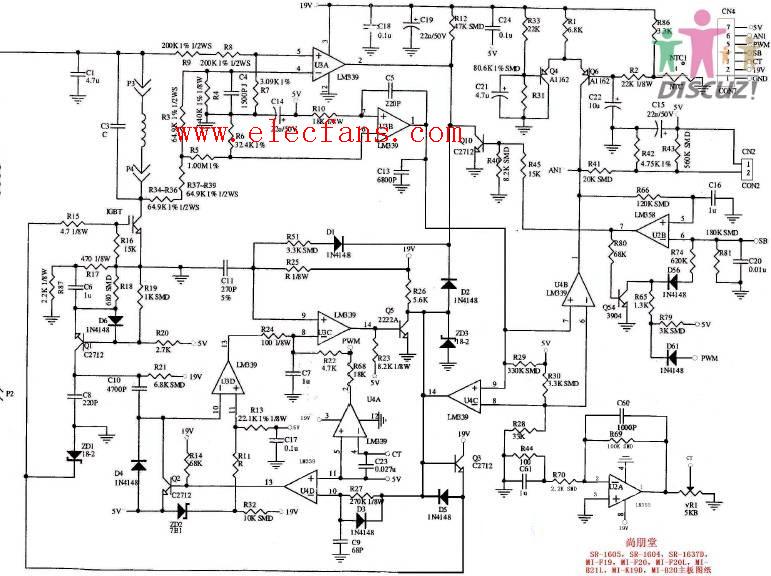
T1次级感应出随初级电流大小而同步变化的电压。经D3-D6全桥整流,C8滤波。电阻R1,R8,R11,VR1分压,C9滤波后送到CPU相应功能脚上检测。原理大致如下:
在无锅具时,线盘和谐振电容震荡时间长,能量衰减慢,流过T1初级电流较少,T1次级电压就低,CPU判断无锅。有锅具时,由于有合适材质的锅具的加入,线盘和谐振电容之间的震荡阻尼加大,能量衰减快,在T1初级变化的电流大,在次级感应出的电压大,CPU判断有锅。
在某些电磁炉中,这种电路结构还可以完成过流检测和过零信号检测,大家应该看输出的电压送到CPU什么样的功能脚上,区别开来。
2 脉冲检锅电路:
IBGT的C极高压脉冲经R10,R9,R41分压后送到LM339内部的一放大器的反向输入脚。而同向输入脚由电源经过R49,R64分压,输入一固定的电压。这样就构成了一个比较器。在1脚输出与6脚相位相反的同步脉冲送到CPU相应的检测功能脚上。原理如下:
无锅具时,线盘和谐振电容的自由震荡时间长,能量衰减长。在单位时间内,脉冲个数少,在有锅具时,由于锅具的阻尼加入,能量衰减很快,单位时间内脉冲的个数就比无锅具时要多很多。这样在比较器的1脚也就输出了同步的脉冲。CPU根据脉冲数量的多少来判断是否有合适材质的锅具。
这种电路结构电磁炉种还有很多,由于基准电压的不同,输出电压送到CPU相应的功能脚上就完成不同的功能。大家要仔细区别。
MI-F19,MI-F20,MI-F20L,MI-B21L,MI-K19D,MI-B20,SR-B20,SR-1637D
工作原理:
CPU的引脚及外围电路
CPU的1脚(PA3)经R77为方波信号SB输出。CPU的2,3,4脚接控制板的显示部分。CPU的5脚输出4KHZ的蜂鸣信号,经过R54,Q51驱动蜂鸣器。同时此信号也经过R53,D60,C56,R83,R82。Q52驱动风扇。CPU的6脚(AN2)为键盘操作的控制信号。也是AC电压检测判断脚。CPU的7脚(AN1信号输入)为IBGT,炉面温度检测信号判断脚。CPU的8脚为锅具检测判断脚。CPU的9脚接地。CPU的10脚为PWM脉冲输出脚。CPU的11脚为复位脚。CPU的12脚为+5V电源。CPU的13.14脚为8MHZ晶振脚。CPU的15.16.17.18脚接控制显示操作电路。
1,直流稳压输出电路
AC进来的电压经变压器T1变压后,在次级输出2组电压,1组经D7-D10整流C55滤波后产生19V,另一组经D51-D54整流,ZD51稳压C54滤波产生12V电压供风扇工作,同时12V经Q56,Q53,R59,ZD56,C57后产生5V供CPU及整机的基准比较电压。
2,锅具检测电路
R44对地取样,经过R70,C60,R69,U2A信号放大,产生CT信号。同时进入R71-R73,C61-C53组成的RC滤波电路送入CPU的8脚,做锅具检测。
3,AC检测
19V电压(变压器次级不经过稳压的)经过ZD55,ZD52,R62,Q58稳压后经过R52,R57分压后进入CPU的6脚,作AC电压的判断。
4,温度检测电路
19V电压经过R86,IBGT的NTC,分压后经R2,C22送入Q6基极。NTC是负温度系数的电阻,具有随温度升高阻值变小,温度降低阻值增大的阻值的特性。温度慢慢↑---V(NTC)慢慢↓---Q6基极电压慢慢↓---Q6导通程度慢慢加升--Q6的CE结阻值也越来越小。19V电压--R1--Q6的CE结--AN1--CPU的7脚,经过CPU内部比较判断,控制CPU的1脚SB方波的输出关闭,机器停止加热。等温度降低后,NTC阻值也恢复正常。Q6截止。CPU送出SB信号。
5,高压峰值保护电路
IBGT的C极电压经过R34-R39.R5.R6分压后进入U3B的6脚。U3B的7脚通过R10接5V做基准比较电压。正常时U3B的7脚电压大于6脚电压,在U3B的1脚输出高电平(也就是U3B内部输出电路处于截止状态,+5V电压经过R29进入U4C的9脚,U4B的7脚,不影响后级电路工作),但IBGT的C极电压高时。U3B的6脚电位大于7脚电位。U3B的1脚内部电路导通(可以理解为输出低电平),把U4C的9脚电位拉低。U4C的8脚电压大于9脚电压,U4C的14脚输出低电平,ZD3电压0V,Q3截止,D5导通。把IBGT的G极信号(VD信号)拉低,IBGT截止。
U3B的1脚信号同时还拉低了U4B的7脚电平,与6脚比较后在U4B的1脚输出低电平经过R66把U2B的5脚电平拉低。U2B的6脚电平大于5脚,在7脚输出高电平,经过R45,R40分压后Q10导通。D1,D2的负极电压等于Q10的结电压近似0V。D1,D2导通。ZD3电压0V,Q3截止,D5导通,IBGT截止。
6,IBGT同步检测电路
线盘P3脚电压经过R9,R8,R7分压后进入U3A的5脚,线盘的P4脚电压经过R34-R39,R3,R4,C4分压进入U3A的4脚。但IBGT导通时,P3为+,P4为-,U3A的5脚电位大于4脚,在2脚输出输出高电平,D1,D2的状态不影响,也就不影响各级电路的工作状态,
当IBGT截止时,线盘P3为-,P4为+,U3A的4脚大于5脚电位,2脚输出低电位,把D1,D2负极电位拉低,不论驱动脉冲是何种电平,ZD3的电压都是0V,IBGT也就处于截止状态。
7,电流保护电路
由U2A产生的CT信号经过可调节电阻VR1进入U4A的4脚。U4A的5脚接5V基准电压,当4脚CT信号超过5脚电位时,U4A的2脚输出低电平,把PWM信号短路。整机无输出。VB1调节后的电压送入CPU来判断锅具的大小及材质,以及CPU来判断改变PWM的脉冲占空比。
8,SB信号和PWM脉冲混合整形驱动电路
方波信号SB从CPU的1脚输出经R77.C20,R81进入U2B的6脚,与5脚做比较。当SB为低电平时,5脚电位大于6脚,U2B的7脚输出高电平,经过R45,R40分压,Q10导通。D1导通,C11放电,U3C的9脚电位降低,PWM信号经过R22和C7的积分电路后变成较为平滑的功率电平后输入U3C的8脚。当9脚电位低于8脚时,U3C的14脚输出高电位,Q5导通C极电位几乎为0,无PWM信号输出,IBGT截止。
当SB信号为高电平时,Q10截止,D1,D2截止,19V电压通过R25向C11充电,随着C11电压的升高,9脚电位大于8脚,在U3C的14脚输出不同占空比的脉冲,由Q5,Q3输出到IBGT工作。
R17上的电压经过Q1放大,C10偶合到U3D的10脚。19V电压经R32,ZD2稳压后进入U3D的11脚做基准电压,同时利用SB驱动信号的变化来控制U3D的13脚,控制PWM信号的电压高低。
在SB为低电平时,Q10导通,D2导通,U4D的10脚电位由于D2的导通电位降低。与U4D的11脚比较后在13脚输出高电平。Q2导通,U3D的10脚电位大于11脚,13脚输出低电位,拉低PWM信号电平。当SB驱动信号为高电平时,U3D的13脚输出高电位,不影响PWM信号的大小。


 工商网监
工商网监