电子产业一站式服务平台

基于ADAS嵌入式导航仪电路设计 —电路图天天读(40)
随着北斗系统的研制与建设,在导航领域我国将会从GPS主宰的局面转向为以我国自主研发的北斗全球导航系统为主的局面。为了实现北斗导航仪更轻便、快捷、低功耗和低成本,提出了一种采用ARM9系列的S3C2440A为处理器的北斗导航仪硬件设计方案,详细给出了系统的硬件体系结构和具体的硬件选型及接口电路设计。并对整个系统进行了硬件平台的搭建和测试,给出了北斗信号处理部分的硬件设计电路板。
核心板电路构成
核心板采用ARM开发板最小系统设计,由S3C2440A处理器作CPU、内存SDRAM、闪存FLASH(NOR FLASH和NANDFLASH)、晶振电路、复位电路和启动配置电路组成。
北斗基带芯片处理模块及电路
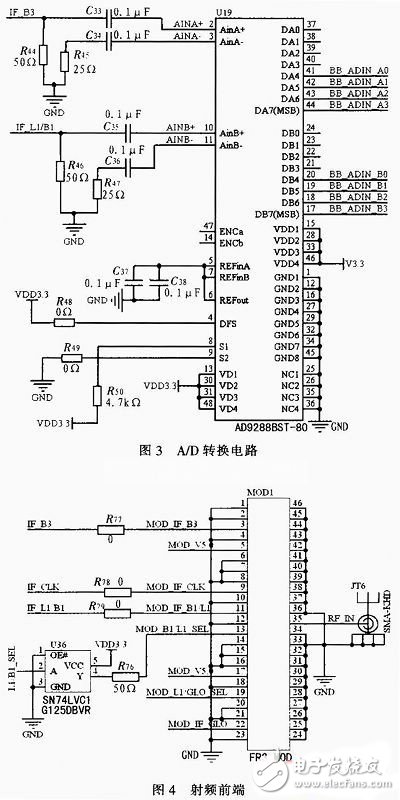
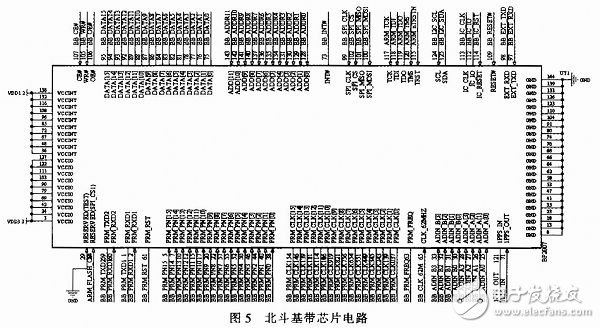
北斗基带芯片采用的是HwaNavchip-1芯片,可快速捕获北斗系统B1和B3频点的精密测距码和北斗/GPS卫星的普通测距码,具有较快的捕获速度、极高的动态跟踪范围和测量精度,通过串口输出标准的二进制或NMEA-0183格式的信号,数据被传送到解析程序进行验证处理,计算出位置信息,并在液晶显示器上进行显示。这部分电路的主要工作原理和过程是将射频信号经过下变频成为模拟中频信号再通过A/D转换得到导航信号,这些信号经过基带处理模块和导航信息处理模块捕获、跟踪、解算得到输出的导航信息。A/D转换和射频前端电路分别如图3、4所示,北斗基带芯片部分电路如图5所示。
底板硬件电路
彩色液晶屏接口及触摸屏驱动电路
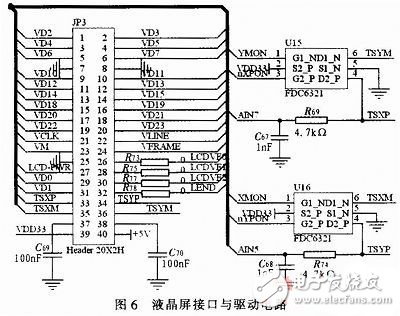
S3C2440A内置有液晶控制器,可以支持最大256 k色TFT彩色液晶屏、最大4 k色STN彩色液晶屏。彩色屏上带有触摸屏(为四线电阻式触摸屏),用于检测屏幕触摸输入信号,有利于提高人机交互的友好性。在使用的时候,需要一套切换控制及ADC转换电路,用于切换触摸屏的X、Y轴输入,并进行A/D转换。接口与触摸屏驱动电路如图6所示。


 工商网监
工商网监